Bonne année 2013 à tous les lecteurs.... et aux autre aussi, y'a pas de raison :-)
Ce midi, petite séance de construction. Et oui, on a bien relu le règlement et paf !!!!le drame. Notre petit robot actuel ne rentre pas dans les 60cm !!!
Il a fallu tout repenser au niveau de la base roulante:
- Fini les codeurs indépendants (je ne parle pas d'informaticiens corses mais bien de roues codeuses)
- Des moteurs mis à la vertical
- Un capteur de ligne pour pouvoir de positionner sur le terrain en cas de dérive (et sans roues codeuse, ça risque d'arriver)
- Une roue folle à l'arrière
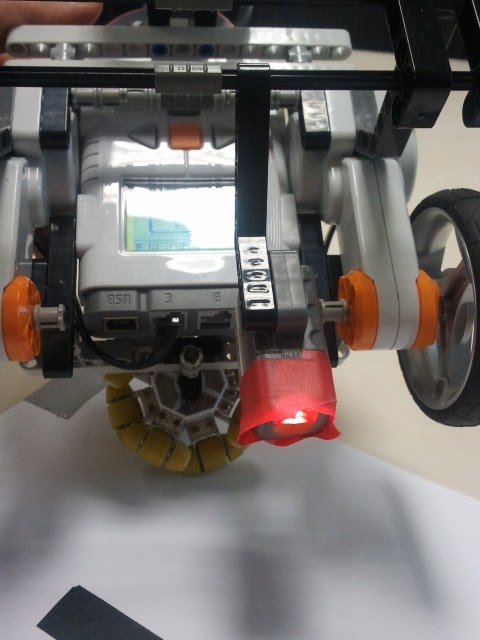
- La brique NXT à l'envers pour pouvoir brancher le chargeur de batterie :-(
- un BAU simplifié avec un unique capteur
- La tirette inexistante sera remplacée par un ordre Bluetooth venant de l'autre robot
 |
| La brique NXT inversée et le capteur de ligne |
 |
| La roue folle et le sonar arrière |
 |
| Les deux sonars et la barre de recalage |
 |
| Le capteur est habillé de chatterton pour limiter les perturbations lumineuses |
L'avantage d'un tel robot est qu'on va pouvoir utiliser Matlab/Simulink pour coder l'asservissement et la stratégie. Il n'y a pas de capteur folklorique non supporté. C'est l'objectif des semaines à venir. Nous devrons également vérifier la robustesse de l'asservissement avec un support balise, voire une balise fictive, qui vont créer une inertie phénoménale, vu la légèreté et l'étroitesse de notre robot.
Autre objectif : intégrer les réservoirs d'air et le ballon le plus à l'arrière possible pour éviter le basculement lors des déplacements.
Enfin on va devoir vérifier qu'il est bien capable d'ouvrir les cadeaux et de se recaler sur les bordures
D'ici fin janvier, on espère avoir un petit robot qui roule correctement et qui marque des points... ça laissera quelques mois pour la mise au point... et le gros robot, faut pas l'oublier celui là :-)